Proteus – PIC 18F4550 USART and LCD
Using Proteus, this project demonstrates how to use the 18F4550 USART to receive, using hardware interrupts, and transmit characters. The characters will be displayed on the LCD.
The schematic diagram

A video of the simulation
Note: On the video version of the simulation, I’m using a COM Port Physical Interface Model, Eterlogic virtual serial port emulator and putty. The ‘spbrg divider’ is set to 16: ‘int divisor = 16;‘
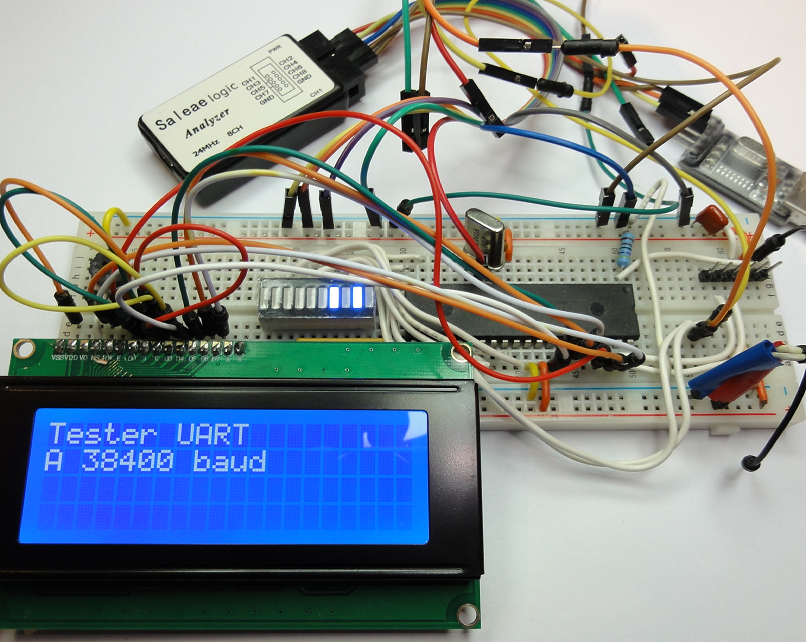
The working prototype on a physical PIC 18F4553
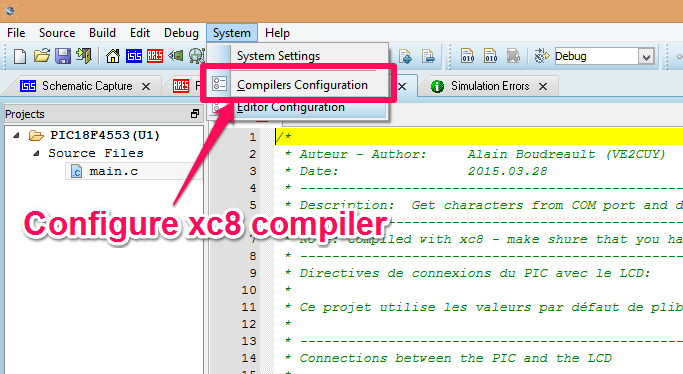
To test the project in Proteus, you will need to install MPLAB XC8 on your workstation:

Source code listing
[sourcecode language= »cpp »]
/*
* Auteur – Author: Alain Boudreault (VE2CUY)
* Date: 2015.03.28
* —————————————————————————–
* Description: Get characters from COM port and display them on LCD.
* —————————————————————————–
* Note: Compiled with xc8 – make shure that you have installed MPLAB XC8
* —————————————————————————–
* Directives de connexions du PIC avec le LCD:
*
* Ce projet utilise les valeurs par défaut de plib/xlcd.h sur BUS 4 bits
*
* —————————————————————————–
* Connections between the PIC and the LCD
*
* LCD PIN PIC PIN
* RW 5 RB6 39
* RS 4 RB5 38
* E 6 RB4 37
*
* DATA: 4 bits
* LCD PIN PIC PIN
* D4 11 RB0 33
* D5 12 RB1 34
* D6 13 RB2 35
* D7 14 RB3 36
*
* UART
* RX -> RC6 (TX)
* TX -> RC7 (RX)
*
* —————————————————————————–
* Data Sheet: http://ww1.microchip.com/downloads/en/devicedoc/39632c.pdf
* See page 237 for USART
*/
#include <xc.h>
#include <plib/xlcd.h>
#include <plib/usart.h>
#pragma config FOSC = INTOSC_EC // Internal clock
#pragma config LVP = 0; // The real LCD will not work with out it. Someone knows why?
#define VITESSE_8MHZ 0b01110000
#define _XTAL_FREQ 8000000L // needed for __delay_ms()
#define BAUD_RATE 38400
#define SYS_FREQ 8000000L
#define FCY (SYS_FREQ/4)
#define END_OF_TIME 1
#define LINE_2 0x40
#define LINE_3 0x14
#define LINE_4 0x54
#define COLONNE_DROITE 19 // Last column
#define LCD_SIZE 80
#define USE_AND_MASKS
unsigned char MsgFromPIC[] = "\r\nYou have typed: \r\n\r\n";
unsigned char enter[] = "\r\n\r\n";
unsigned char info[] = "=====================================================\r\nUART example on 18F4550\r\nBy Alain Boudreault – AKA VE2CUY, AKA Puyansude\r\n(c) 2015.28.03\r\n=====================================================\r\n\r\n";
unsigned char msg_depart[] = "Type some characters followed by ‘Enter’\r\n—————————————————–\r\n\r\n";
unsigned char MessageBuffer[200];
int i=0;
// ***************************************************
// Prototypes des fonctions locales au projet
// —————————————————
// Functions Prototype
// ***************************************************
void init_XLCD(void);
void initXLCDWithShift(void);
void cls(void);
void DelayFor18TCY(void);
void DelayPORXLCD(void);
void DelayXLCD(void);
void uneDemieSeconde(void);
void afficherMessage(void);
void afficherMsgAvecDelai(char * msg[], int sec, int position);
void testerUART(void);
// ***************************************************
void testerUART(void)
// ***************************************************
{
int UART1Config = USART_TX_INT_OFF & USART_RX_INT_ON & USART_ASYNCH_MODE & USART_EIGHT_BIT & USART_BRGH_HIGH ;
// These are default values – but just in case:
SYNC = 0; // Asynchronous
BRG16 = 0; // 8-bit
BRGH = 1; // High Baud Rate
int divisor = 4;
int spbrg = _XTAL_FREQ / BAUD_RATE / divisor – 1; // Set baud rate
OpenUSART(UART1Config,spbrg);
__delay_ms(50); // or else garbage the first time…
putsUSART(info);
putsUSART(msg_depart);
} // testerUART()
// ***************************************************
void interrupt traitementDesInterruptions()
// ***************************************************
{
//UART RX ?
if(PIR1bits.RCIF == 1)
{
if(i<200) //our buffer size
{
MessageBuffer[i] = ReadUSART(); //read the byte from rx register
if(MessageBuffer[i] != 0x0D) {
putcXLCD(MessageBuffer[i]); // Afficher le car sur le LCD
PORTD = MessageBuffer[i]; // Rétroaction sur PORTD
}
else // Nous avons reçu un Enter -> renvoyer vers UART
{
for (int compteur = 1; compteur<=LCD_SIZE; compteur++)
putrsXLCD(" ");
putsUSART(MsgFromPIC);
putsUSART(MessageBuffer);
putsUSART(enter); putsUSART(msg_depart);
for(;i>0;i–)
MessageBuffer[i] = 0x00; //clear the array
i=0; //for sanity
return;
}
i++;
PIR1bits.RCIF = 0; // clear rx flag
}
else
{
putsUSART(MessageBuffer);
for(;i>0;i–)
MessageBuffer[i] = 0x00; //clear the array
i=0; //for sanity
return;
}
} // if(PIR1bits.RCIF == 1)
} // traitementDesInterruptions()
// ***************************************************
void main(void) {
// ***************************************************
OSCCON = VITESSE_8MHZ; // set Fosc to 8mhz
init_XLCD();
//Set interrupt (for USART)
RCIF = 0; //reset RX pin flag
RCIP = 0; //Not high priority
RCIE = 1; //Enable RX interrupt
PEIE = 1; //Enable pheripheral interrupt (serial port is a pheripheral)
ei(); //remember the master switch for interrupt?
// Display start messages on startup
afficherMsgAvecDelai("USART test ", 1, 0);
afficherMsgAvecDelai("At 38400 baud", 1, LINE_2);
afficherMsgAvecDelai("By VE2CUY (c) 2015", 3, LINE_3);
afficherMsgAvecDelai("This is line 4", 1, LINE_4);
cls();
afficherMsgAvecDelai(" Start putty ", 1, 0);
afficherMsgAvecDelai("and type", 1, LINE_2);
afficherMsgAvecDelai("some characters…", 3, LINE_3);
cls();
initXLCDWithShift();
testerUART();
while (END_OF_TIME); // This is possible because we are using interrupts for the USART
} // main()
// ***************************************************
// local functions
// ***************************************************
void init_XLCD(void)
// ***************************************************
{
OpenXLCD(FOUR_BIT&LINES_5X7); // configure LCD: 4-bit, 5x7char, multi-lines
while(BusyXLCD()); // Wait until LCD !busy
WriteCmdXLCD(0x06); // 06 = pas de swift, 07 = shift vers la gauche
WriteCmdXLCD(0x0C); // display on without cursor
} // init_XLCD
// ***************************************************
void initXLCDWithShift(void)
// ***************************************************
{
OpenXLCD(FOUR_BIT&LINES_5X7); // configure LCD: 4-bit, 5x7char, multi-lines
while(BusyXLCD()); // Wait until LCD !busy
WriteCmdXLCD(0x07); // 06 = pas de swift, 07 = shift vers la gauche
WriteCmdXLCD(0x0F); // display on with blink cursor
while(BusyXLCD());
SetDDRamAddr(COLONNE_DROITE); // Placer le curseur à la dernière colonne de la ligne 1
} // init_XLCD
// ***************************************************
// Clear LCD screen
void cls(void){
// ***************************************************
while(BusyXLCD()); //Check if the LCD controller is not busy
WriteCmdXLCD(0x01); // Clear LCD
} // cls
// ***************************************************
// Wait 500ms
void uneDemieSeconde(void){
// ***************************************************
for (int i=0;i<10;i++)
__delay_ms(50);
} // uneDemieSeconde
// ***************************************************
// Display message on LCD and wait delay
void afficherMsgAvecDelai(char * msg[], int sec, int position) {
// ***************************************************
while(BusyXLCD());
SetDDRamAddr(position);
while(BusyXLCD());
putrsXLCD( msg );
while(BusyXLCD());
for (int i = 0 ; i<sec; i++) {
uneDemieSeconde();
}
} // afficherMsgAvecDelai
// Implémentation des routines de délais pour plib/xlcd.h
// Note: Il faut définir la constante suivante:
// #define _XTAL_FREQ 8000000 // Note: 8mg est un exemple
//
// ———– Delay functions for the LCD ———–
// ***************************************************
void DelayFor18TCY(void)
// ***************************************************
{ __delay_us(72); // Value of 18 did not work for me!
}
// ***************************************************
void DelayPORXLCD(void)
// ***************************************************
{ __delay_ms(15); }
// ***************************************************
void DelayXLCD(void)
// ***************************************************
{ __delay_ms(5); }
[/sourcecode]
The Proteus project with source code is available here.
Pingback: Proteus USART simulation on a PIC 18F4550 | ve2cuy